Astra S56 Stereo Camera
Overview
The S56S stereo camera is a module engineered specifically for embodied intelligence applications. It features dual 5MP Global Shutter image sensors and is developed with a high-reliability GMSL2 serial interface. The module is equipped with a 6-axis IMU and boasts a human-like 60mm baseline. It integrates wide-angle lenses that provide a 130° Horizontal Field of View (HFOV).

Key Features and Application
Features:
• GMSL2 Coaxial Long-distance Transmission
• Global Shutter Technology
• Stereo Trigger Synchronization
• Integrated 6-axis IMU
Application:
• Humanoid Robots
• Embodied Intelligence
• Teleoperation
• 3D Scanning
Getting Started
Specifications
| Parameter | Specification |
|---|---|
| QTY Of Sensor | 2 |
| Resolution | 2560 (H) × 1984 (V) |
| Frame Rate | 2560 × 1984 @30FPS |
| Shutter | Global shutter |
| Output Format | 10-bit RAW |
| Baseline | 60.00 ± 0.5 mm |
| Color / Mono | Color sensor |
| IMU | SCHA634-D03/BMI088 |
| Camera Interface | GMSL2 |
| Power Supply | 9 - 16 VDC |
| Current | < 200mA |
| Connector | Amphenol (Z Type Fakra) |
| Operating Temp | -30~+70°C |
| Storage Temp | -30~+70°C |
| Dimensions | W: 30mm, L:84mm, H:25.44mm |
| Ingress Protection | IP52 |
| Weight | < 200g |
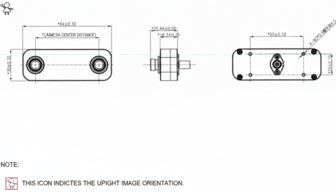
Dimensions
Hardware Overview
Block Diagram
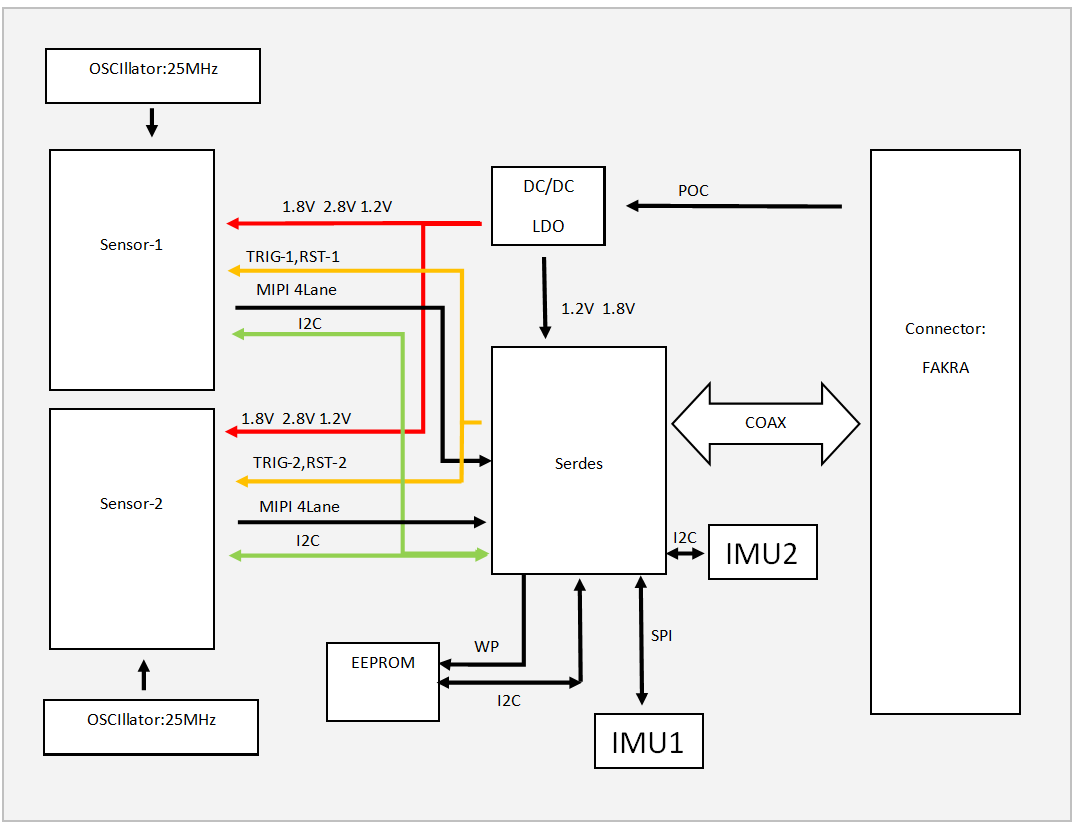
IMU1: SCHA634-D03 (6-axis IMU)
IMU2: BMI088 (6-axis IMU)
The camera is Dual IMU Support: Currently defaults to State 1 (IMU1); State 2 (IMU2) is selectable.
I2C Address Information
| Component | Parameter | Value |
|---|---|---|
| Serializer | Model | MAX9295D |
| I2C Address | 0x80 (8bit address) | |
| GMSL Rate | GMSL2 (6G bps) | |
| Sensor-1 | I2C Address | 0x20 (8bit address) |
| Frame Sync | Controlled by MAX9295D MFP7 | |
| Reset | Controlled by MAX9295D MFP3 | |
| Data Type | RAW 10bit | |
| Sensor-2 | I2C Address | 0x22 (8bit address) |
| Frame Sync | Controlled by MAX9295D MFP7 | |
| Reset | Controlled by MAX9295D MFP8 | |
| Data Type | RAW 10bit |
Lens Options
| Model | HFOV | VFOV | F.No | EFL (mm) | DOF |
|---|---|---|---|---|---|
| S56 Stereo Camera | 130°±3° | 102°±3° | 2.0 | 2.18mm | 0.3~INF |
Employing Camera
1. Adaptation to NVIDIA® Jetson™ platform
Step 1: Installation Steps
- Connect the S56 stereo camera to the SG10A-AGON-G2M-A1 board using the coaxial cable
- Mount the SG10A-AGON-G2M-A1 board onto the Jetson AGX Orin module
- S56 stereo camera Connect the power supply
- SG10A-AGON-G2M-A1 board Connect the power supply
- Power on the system
Step 2: Software Preparation
-Select the appropriate driver package based on your camera type and JetPack version:
-Copy the full link address to DownGit to download
| NO. | JetPack Version | Camera | NVIDIA Jetson Devices | Adapter Board | Download Link |
|---|---|---|---|---|---|
| 1 | JP6.2 | S56 stereo camera | Jetson AGX Orin Developer Kit | SG10A-AGON-G2M-A1 | Download |
NVIDIA JetPack (Jetpack 5.1.2 or Jetpack 6.0 ) is the official software development kit (SDK) for the Jetson series of development boards. It includes the operating system, drivers, CUDA, cuDNN, TensorRT, and other development tools and libraries. Each JetPack version typically corresponds to a specific Jetson Linux version (formerly known as L4T - Linux for Tegra).
- 36.4.3: L4T R36.4.3 (Jetpack 6.2)
- 36.4: L4T R36.4 (Jetpack 6.1)
- 36.3: L4T R36.3 (Jetpack 6.0)
- 35.4.1: L4T R35.4.1 (Jetpack 5.1.2)
For more information, visit NVIDIA's official Jetson Download Center.
2. Camera Integration with Customer's Self-developed Platform
For customers with their own deserializer who want to adapt our camera (serializer) to their platform, detailed technical coordination is required.
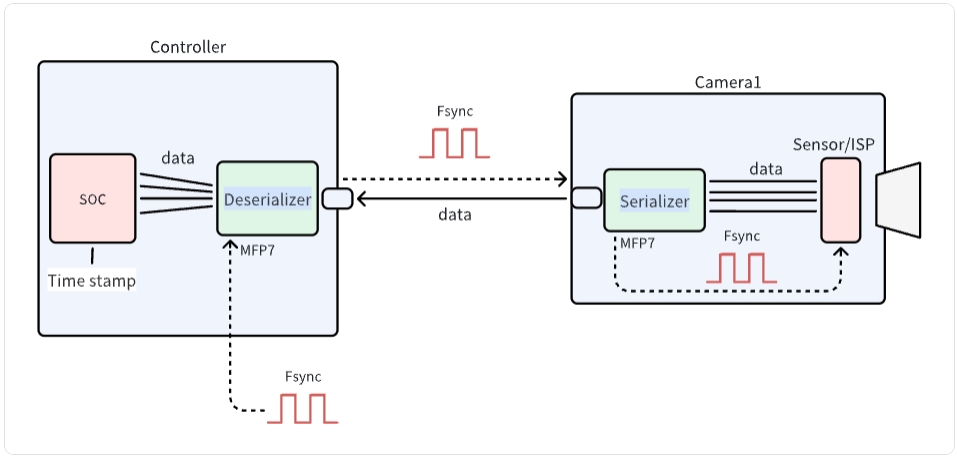
The diagram illustrates the communication architecture between a camera and controller system. It shows how data flows from the Sensor/ISP through the Serializer on the Camera side, across to the Deserializer and SOC on the Controller side. The system utilizes Fsync signals for synchronization and MFP7 interfaces for control. This architecture is essential for proper integration of SENSING cameras with customer-developed platforms.
Step 1: Link Register initialization
SENSING will provide:
-
Serializer and Deserializer Configuration
- Register configuration for the camera module-Getting Camera Information
- I2C communication protocol details
-
Link Status Troubleshooting Guide
- Link training parameters
- Error detection settings
Please refer to the software flow and demo code below to develop your driver code.
Software Development
- Driver Development:
/* Example code for MAX9296 I2C initialization */
#define MAX9296_I2C_ADDR 0x90 // 8-bit address
int max9296_init() {
// Initialize I2C bus
i2c_init();
// disable MIPI output
i2c_write(MAX9296_I2C_ADDR, 0x0313, 0x00);
delay_ms(100);
// Configure link settings for GMSL2 (6Gbps)
i2c_write(MAX9296_I2C_ADDR, 0x0001, 0x02);
// Configure linkA and linkB settings for GMSL2 selection (default value)
i2c_write(MAX9296_I2C_ADDR, 0x0006, 0xC0);
// Configure MIPI rate 1200Mbps
i2c_write(MAX9296_I2C_ADDR, 0x0320, 0x2C);
// enable MIPI output
i2c_write(MAX9296_I2C_ADDR, 0x0313, 0x02);
return 0;
}
- Camera Configuration:
/* Example code for initialization */
#define MAX9295_I2C_ADDR 0x80 // 8-bit address
int camera_init() {
// Initialize deserializer first
max9296_init();
// Reset ISP through MAX9295A
i2c_write(0x80, 0x02BE, 0x10); // MFP0 high
//
i2c_write(0x80, 0x0057, 0x12);
i2c_write(0x80, 0x005B, 0x11);
// Configure datatype RAW10
i2c_write(0x80, 0x0318, 0x6B);
// camera trigger MFP7 low to high
i2c_write(0x80, 0x02D3, 0x00); // MFP7 low
delay_ms(300);
i2c_write(0x80, 0x02D3, 0x10); // MFP7 high
return 0;
}
Integration Steps
-
BSP Integration:
- Modify the device tree to include the CSI interface configuration
- Add camera driver to kernel build configuration
- Configure media controller pipeline for the camera
-
Application Development:
/* Example code for capturing camera frames */
#include "camera_api.h"
int main() {
// Open camera device
int fd = open("/dev/video0", O_RDWR);
if (fd < 0) {
perror("Failed to open camera device");
return -1;
}
// Configure video capture format
struct v4l2_format fmt = {0};
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = 1920;
fmt.fmt.pix.height = 1536;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_RAW10;
if (ioctl(fd, VIDIOC_S_FMT, &fmt) < 0) {
perror("Failed to set format");
close(fd);
return -1;
}
// Request and map buffers
// ... (buffer setup code) ...
// Start streaming
// ... (streaming code) ...
// Capture and process frames
// ... (frame processing code) ...
// Cleanup
close(fd);
return 0;
}
Step 2: Data Processing
After receiving the module data through the MIPI CSI interface:
- Data Reception
- MIPI CSI-2 protocol implementation
- Data rate configuration
- Image Processing
- RAW10 data parsing
- Image format conversion
- Display configuration
Technical Support
-
Documentation
- Detailed register descriptions
-
Engineering Support
- Technical consultation
- Debug assistance
- Performance optimization
SENSING Technology provides technical support for integration with most platforms. For detailed documentation, sample code, and technical assistance, please contact our support team.