CCG3-8H 应用
自动驾驶感知方案
视频采集卡可应用于无人车系统。无人车通常需要多路摄像头、毫米波雷达、激光雷达、GPS、组合导航等传感器,并需要将这些传感器接入高性能计算平台(如工业计算机)。因此,需要一种能够同时连接多路摄像头并与其他传感器同步的产品。视频采集卡正是面向无人车提供高速、多摄像头、低延迟图像接入的解决方案。以下是典型方案示例。
系统架构
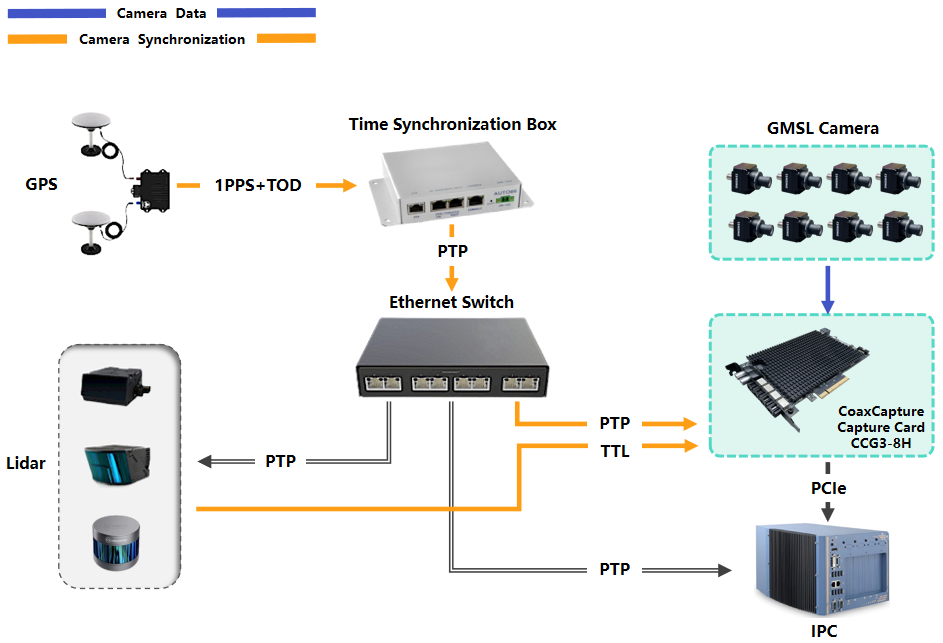
- GMSL 摄像头: 多路高分辨率摄像头连接到 CoaxCapture 采集卡,由采集卡汇聚并同步各路视频流。
- CoaxCapture 采集卡: 通过 PCIe 安装在车辆 IPC(工业计算机)中,接收摄像头数据和同步信号,确保所有通道达到帧级对齐。
- GPS 模块: 提供 1PPS(每秒脉冲)和 TOD(时间信息)信号,作为全局时间参考。
- 以太网交换机: 支持 PTP/gPTP(精确时间协议/通用精确时间协议),用于激光雷达、雷达及其他传感器之间的时间同步。
- 激光雷达/外部设备: 向 CCG3-8H 提供 TTL 方波信号,实现硬件级摄像头同步,确保摄像头采集与传感器测量之间精确对齐。
- IPC(工业计算机): 中央处理单元,用于采集、处理并存储来自所有传感器的同步数据。
同步流程
- GPS 向时间同步盒提供 1PPS 和 TOD 信号,时间同步盒再通过以太网向采集卡及其他设备输出 PTP 信息。
- CoaxCapture 采集卡使用这些信号同步所有已连接的 GMSL 摄像头,确保每一帧都具备准确时间戳,并与车辆其他传感器对齐。
- 以太网交换机将 PTP/gPTP 信号传递到激光雷达、雷达及其他设备,实现全系统时间同步。
- 包括视频、激光雷达和雷达在内的所有传感器数据均由 IPC 采集,用于实时处理和记录。
快速启动
SDK 下载
| 摄像头 | Linux 系统版本 | 驱动包下载链接 | 驱动包下载方式 |
|---|---|---|---|
| GMSL2 摄像头 (YUV 数据) (例如: SG3S-ISX031C-GMSL2-Hxxx) | Ubuntu 18.04/20.04/22.04/24.04 | 链接 | 复制完整链接地址到 DownGit 下载 |
1. 编译驱动
使用驱动前需要先进行编译。Driver 目录中包含一个 Makefile,可同时构建驱动和应用程序。你可以使用顶层 Makefile 构建整个项目,也可以进入各个目录单独编译。
编译驱动:
make
如果需要清理构建目录并重新构建:
make clean
make
2. 使用说明
2.1 加载驱动
加载驱动时,需要以管理员权限运行 load_modules.sh 脚本。在 bash 目录中执行以下命令:
sudo ./load_modules.sh
如果驱动加载成功,会看到以下信息:
Loading Pcie driver...
Pcie driver installed correctly.
Video devices were recognized.
DONE
此外,/dev 目录中会创建视频设备和控制接口文件:
/dev/video0,/dev/video1,/dev/video2,/dev/video3(每张采集卡对应的视频设备)/dev/xdma0_bypass,/dev/xdma0_control,/dev/xdma0_user(每张采集卡对应的控制接口设备)
注意:数字(0、1、2 等)对应采集卡索引。例如,xdma0_bypass 对应第一张采集卡,xdma1_bypass 对应第二张采集卡,依此类推。
2.2 初始化采集卡
初始化第一张采集卡并配置连接的摄像头时,使用以下命令:
sudo ./pcie_init_card0.sh
如果脚本执行失败,可能需要按前文说明重新构建驱动和应用程序。
2.3 图像测试
可以使用开源工具 guvcview 测试摄像头视频流。如果尚未安装,可执行:
sudo apt-get install guvcview
测试视频流时,对每个视频设备执行以下命令:
guvcview -d /dev/video0
guvcview -d /dev/video1
此时应能看到每个已连接摄像头的实时视频。
3. 配置采集卡
该目录中提供两个示例脚本:pcie_init_card0.sh 和 pcie_init_card1.sh。这些脚本用于初始化采集卡并配置已连接摄像头,可根据摄像头规格进行修改。
配置参数
在配置脚本中,可修改以下参数以定制采集卡和摄像头的行为。
3.1 修改板卡编号
脚本第 10 行指定板卡编号:
set_card 0
0 表示第一张采集卡。第二张卡可改为 1,依此类推。
3.2 摄像头 ANC 配置
脚本第 27-34 行用于配置摄像头是否启用 ANC(辅助数据)功能。设置 0 表示启用 ANC,设置 1 表示禁用。x 表示接口编号(第一张卡为 0-7,第二张卡为 8-15,依此类推)。
camera_anc_enable[x]
3.3 图像输出格式
"第 38-45 行对应摄像头输出格式。RAW 可忽略;YUYV 或 UYVY 配置错误可能导致图像显示异常。
第一个参数(如下方 0 所示)表示使用哪个接口。第一张采集卡的 1-8 通道对应 0-7,第二张采集卡的 1-8 通道对应 8-15。
第二个参数用于指定摄像头输出图像格式,可设置为 'YUYV' 或 'UYVY'。"
video_output_yuv_format 0 "UYVY"
3.4 触发模式
在脚本中配置触发模式。可选项如下:
0: 无触发(仅主模式,无需外部触发)。1: 保留。2: 内部触发(PCIe 卡按指定频率触发摄像头)。3: 外部触发(由外部信号触发)。
card_trigger_signal_mode "2"
3.5 外部触发配置
如果使用外部触发,请配置以下参数:
card_external_signal_input_fps "1" Hz
camera_external_output_fps "30" Hz
3.6 内部触发配置
当 card_trigger_signal_mode 参数设置为 "2" 时,第 66 行的 camera_inner_output_fps 用于配置内部生成触发信号的频率,单位为 Hz。
camera_inner_output_fps "30" Hz
3.7 触发延迟
可以为每个摄像头设置触发延迟:
camera_triger_delay[x]=0
3.8 摄像头 分辨率
为每个摄像头接口配置分辨率(例如接口 0 设置为 1920x1080):
camera_resolution 0 1920 1080
3.9 摄像头初始化
camera_serdes_type 参数用于初始化摄像头传感器、串行器和解串器。例如:
camera_serdes_type[0]=1
常见 YUYV 或 UYVY 配置
| 串行器 | ANC | 配置参数 |
|---|---|---|
| MAX96705 | 否 | 0 |
| MAX9295 | 否 | 1 |
| MAX96717F | 否 | 2 |
| MAX9295 | 是 | 3 |
| MAX96717F | 是 | 4 |
常见 RAW 或 RAW12 配置
| 串行器 | 传感器型号 | 配置参数 |
|---|---|---|
| MAX9295 | AR0233 | 102 |
| MAX9295 | AR0820 | 103 |
| MAX9295 | IMX390 | 104 |
| MAX9295 | IMX490 | 105 |
| MAX9295 | ISX031 | 11 |
| MAX9295 | IMX728 | 106 |
| MAX9295 | SC2331AT | 108 |
| MAX9295 | OX08D | 109 |
| MAX96717F | IMX623 | 113 |
该架构适用于自动驾驶、ADAS 开发,以及任何需要精确同步多传感器数据采集的应用。